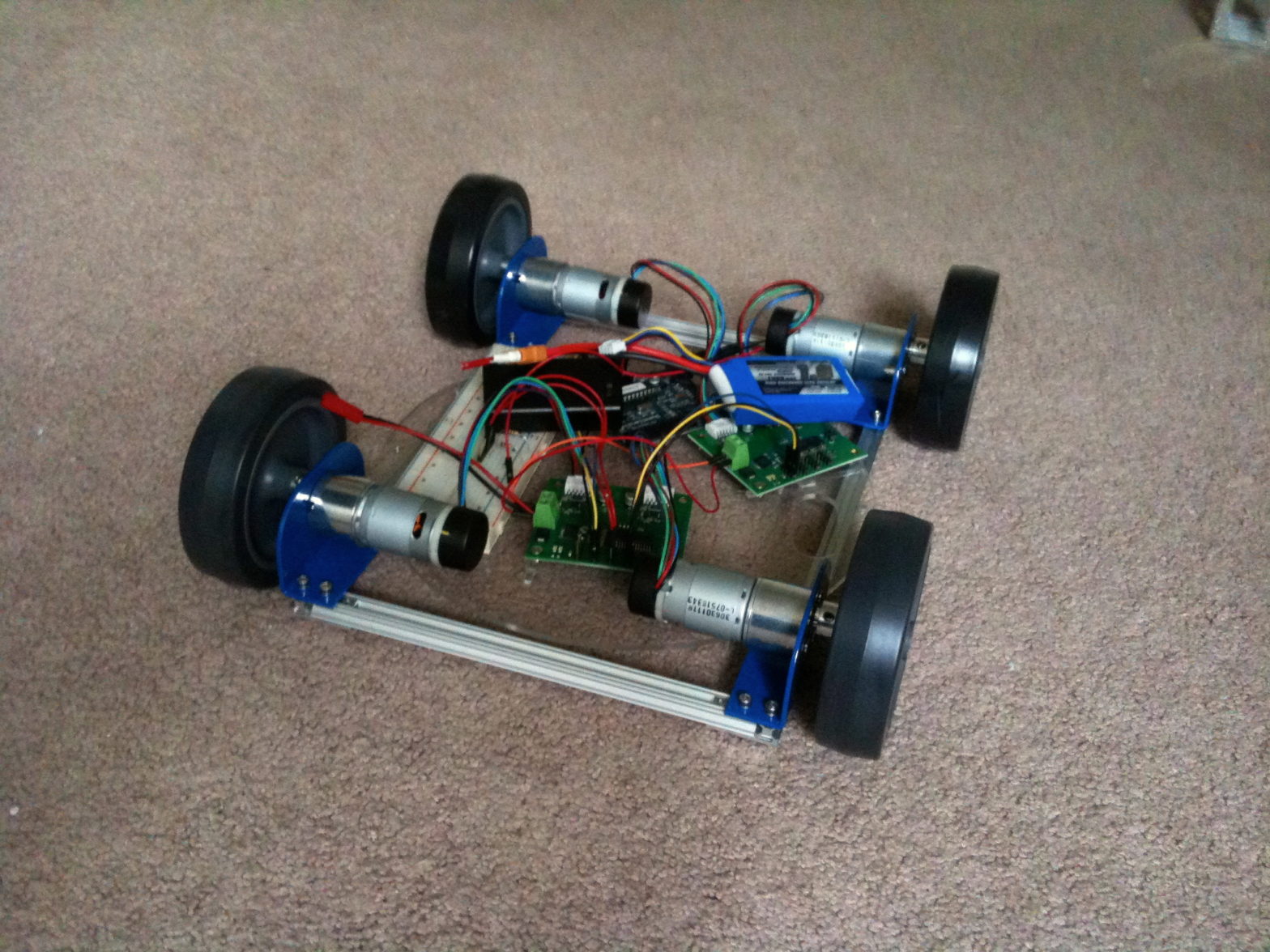
This passed week I have been playing with the new motors and motor drivers I got for the Mecanumbot. I used some MicroRAX pieces and the supplied motor brackets to piece everything today. I controlled the MD25 motor controllers over I2C using an Arduino which was getting commands from an RC transmitter. Unfortunately the naive method of reading in the RC receiver signals of only three channels takes up nearly 100% of the Arduino’s processing power rendering it useless for anything else – but it worked great just for this!
Mecanumbot Motor Testing
hi,
i am dire need of mecanum wheels for my project.can you please tell me where can i find them?. i mean dealers.
waiting for your reply
thanking you
yours sincerely,
j.ajay
Hello Josh
I am very impressed by your project. I am wondering how you connect the mecanum wheels to the emg30. i could not find a hub connecting the nexusrobot to the 5mm of the emg 30. Can you give me a tip?
Best regards